Reconnaître forme, position et limites
Donner à l’IA un toucher réelAider les robots à comprendrele monde physique
Pour l’ère de l’intelligence incarnéeInfrastructure d’intelligence physique
NeuroSkin donne à l’IA incarnée une couche tactile pour ressentir et interagir avec le monde.
Perception Tactile Flexible
Matrices tactiles ultra-densesPerception conforme pleine surface
Peau Électronique Robotique
Réseau tactile corps entierUne seconde peau pour les robots
Infrastructure d’IA physique
Couche de données physiquesÉvolution de l’IA incarnée
Moteur d’Intelligence Tactile
Comprendre contact et forceInterpréter le mouvement par le toucher
Modèle du Monde Tactile
Construire une cognition physiqueModéliser le réel par le contact
Flywheel de Données
Boucle de données du monde réelPlus déployé, plus intelligent
Pourquoi le toucher compte
Le toucher permet à l’IA de faire confiance au monde
La vision montre. Le langage raisonne. Le toucher transforme force et texture en données.
Contact reelSignaux tactilesModele physique fiable
ContactForceFrictionGlissementTextureDéformation
Le vrai défi commence après le contact.

Organiser connaissances, consignes et raisonnement
Vérifier contact, force et changement
Infrastructure d’intelligence physique
Capacité cœur : plateforme de modèles tactiles
NeuroSkin relie matrices, peau robotique et scènes réelles dans un système entraînable.
Plateforme cœurPlateforme de modèles tactiles
La plateforme collecte contact, force, glissement et texture pour entraîner les robots.
Déploiement tactileDonnées réellesEntraînement du modèleBoucle robotique
Transforme le contact réel en actifs de données entraînables, réutilisables et croissants.
Apprend les relations physiques entre contact, force, glissement, friction et déformation.
Améliore manipulation fine, préhension stable et modèles du monde robotique.
Nous ne construisons pas seulement des dispositifs tactiles.
Nous construisons une plateforme de modèles tactiles et de données physiques.
Matrice produit cœur
Matrice des produits clés
Le matériel tactile transforme le contact réel en données entraînables.
Couche de perception phareLe toucher dit à l’IA ce qu’est le monde.
UltraMatrix
UltraMatrix™
Construire la couche de données tactiles depuis les matrices flexibles.UltraMatrix™ alimente NeuroSkin avec contact, pression et glissement.
8192+ points détectent les variations fines de contact
Structure ultra-mince de 0.18mm pour surfaces complexes
Transforme l’interaction physique en données entraînables
Ultra-minceTrès flexibleHaute densitéSurfaces conformes

8192+Points tactiles haute densitéPerception matricielle
0.18mmFlexibilité ultra-minceNiveau industriel
98%+Précision de pressionMesure stable
<10msLatence tactile temps réelRéponse rapide
-40℃~85℃Fonctionnement large températureFiabilité industrielle

02
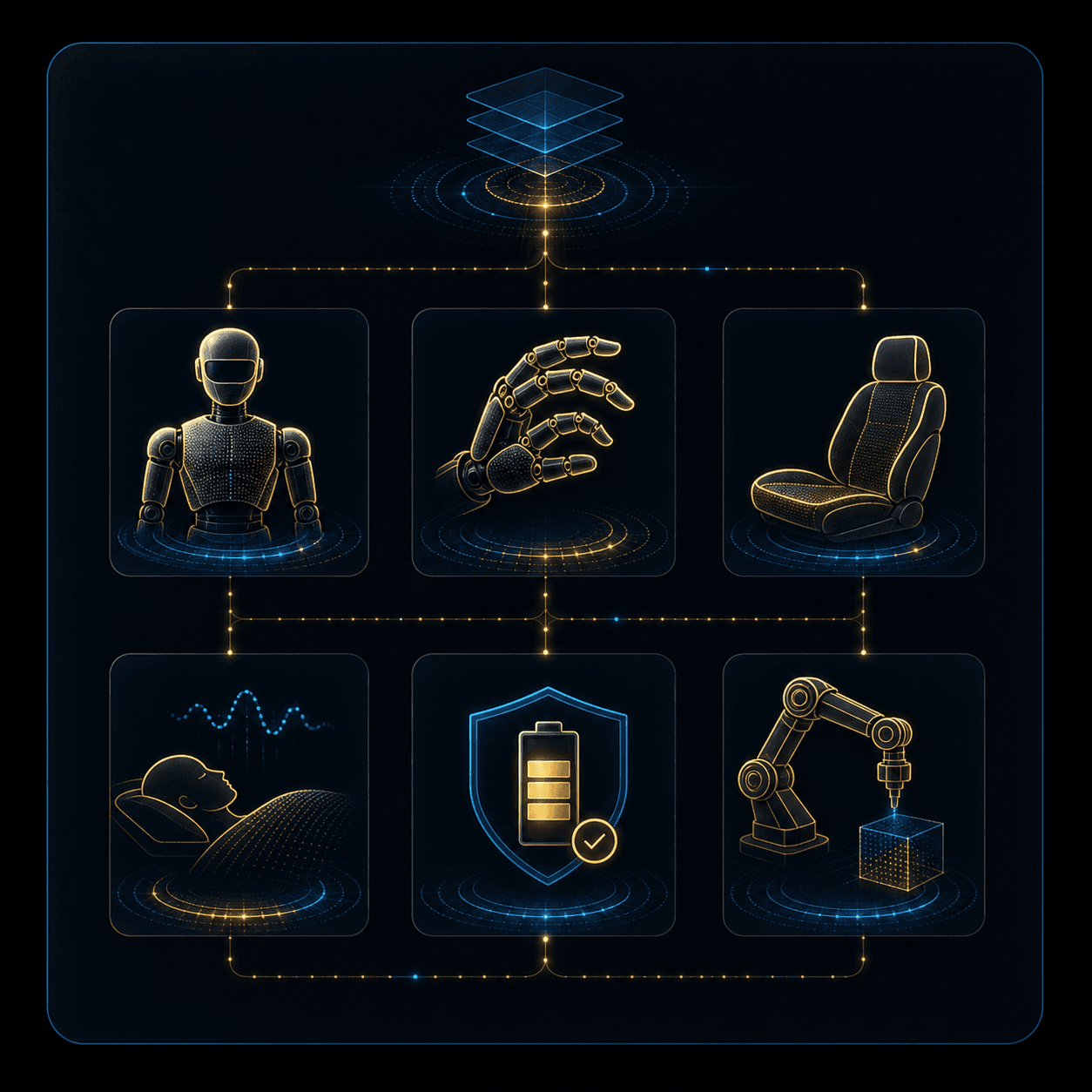
DexSense™
Toucher du doigt robotique
Forme du doigtPréhension stableAnti-glissement
Mains robotiquesAssemblage
03
NeuroSkin™
Peau électronique corps entier
Couverture corpsToucher temps réelRetour de données
HumanoïdesRobots service

04
SeatSense™
Posture et pression du siège
PostureCarte pressionInteraction cabine
Sièges intelligentsJoints porte

05
SleepGuard™
Sommeil et signes vitaux
Coeur et souffleAnalyse sommeilAlerte sortie
Matelas intelligentSoins longue durée

06
Battery Safety System
Alerte pression batterie
PressionAlerte précocePrévention thermique
BatteriesStockage énergie
NeuroSkin Data Flywheel
Flywheel de données NeuroSkin
NeuroSkin transforme chaque contact réel en données utiles aux robots.
Déployer les surfaces tactiles
La peau électronique couvre mains, bras, corps et scènes réelles.
Capturer le contact réel
Pression, glissement, friction, déformation et résultats deviennent des données.
Entraîner et améliorer
Les modèles apprennent la physique du contact et renforcent les robots.
Déployer
Ajouter le toucher aux robots.
Percevoir
Capturer contact et glissement.
Structurer
Rendre les données entraînables.
Entraîner
Apprendre la physique du contact.
Améliorer
Améliorer prise et contrôle.
Plus de déploiements, plus de données tactiles. Plus de données, meilleure intelligence physique.
Architecture complète d’intelligence tactile
Architecture tactile full-stack
NeuroSkin relie matrices, puces, algorithmes, cloud et applications.
Perception
Couche perception
Transformer le contact réel en signaux tactiles denses.
- UltraMatrix
- NeuroSkin
- Matrices flexibles
Puce
Couche puce
Capturer et transmettre les signaux à basse énergie.
- NeuroSkin SoC
- Edge AI
- Basse énergie
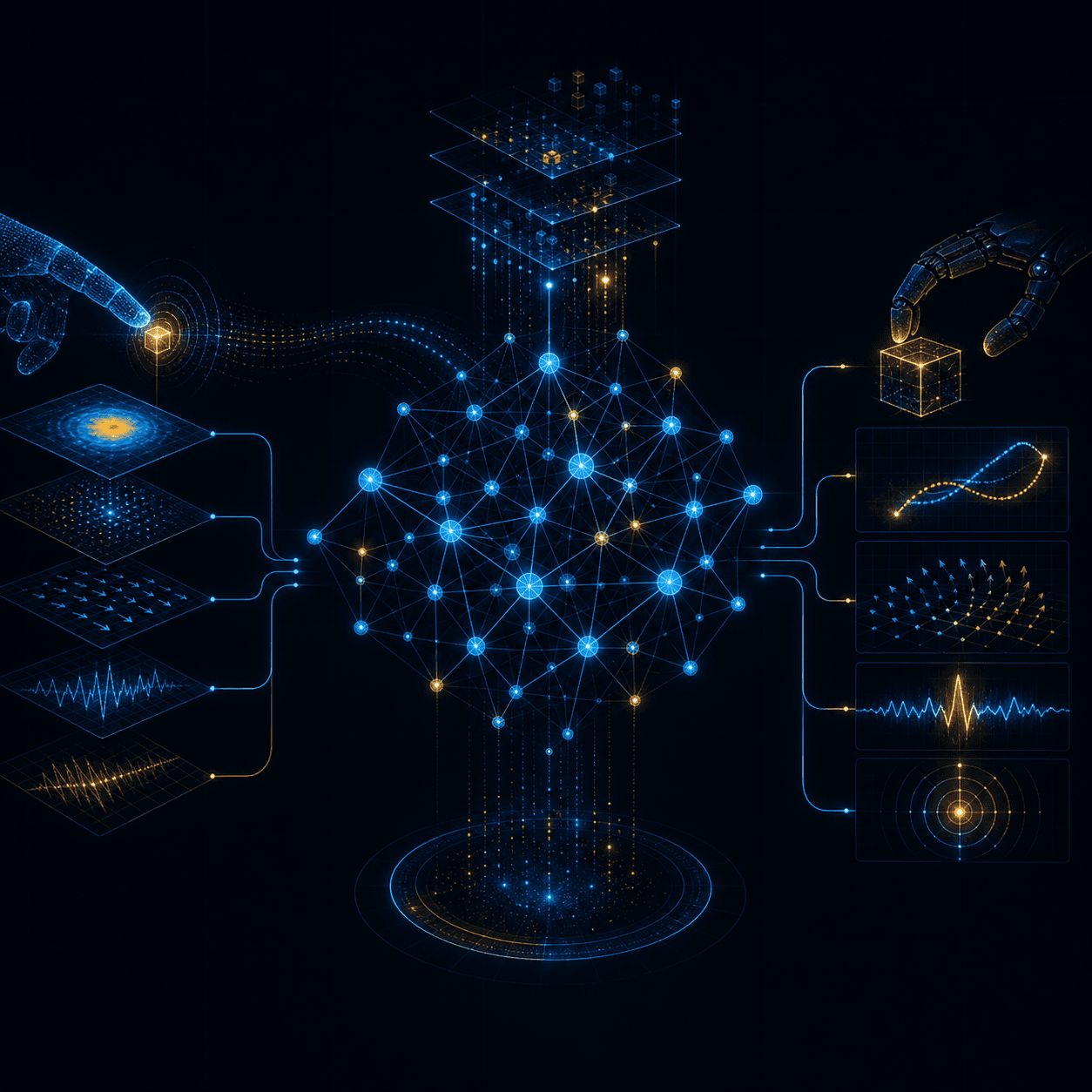
Algorithme
Couche algorithme
Comprendre force, glissement, friction et texture.
- Force
- Glissement
- Friction

Plateforme
Couche plateforme
Boucler données, entraînement et optimisation.
- Volant de données
- Entraînement modèle
- API/SDK
Application
Couche application
Servir robots, habitacles, santé et énergie.
- Robots
- Habitacle
- Batterie
Barrière technologique
Barrière technologique clé
Des matériaux aux modèles, NeuroSkin transforme le toucher en avantage système cumulatif.
 01
01Résolution tactile
UltraMatrix
Des nœuds denses transforment le contact en signaux calculables.
 02
02Matériaux
Flexible Materials
Les structures souples épousent les surfaces courbes et complexes.
 03
03Compréhension tactile
Touch AI
Pression, glissement, friction et texture deviennent compréhension.
 04
04Boucle de données
NeuroSkin Flywheel
Les données tactiles réelles renforcent les modèles en continu.
 05
05Modèle fondation
Tactile Foundation Model
L’expérience tactile devient une intelligence physique réutilisable.
La technologie est la base. Les données tactiles réelles deviennent la barrière durable.
Vision d’avenir
La voie future de l’intelligence tactile
NeuroSkin apporte le toucher réel aux scénarios d’intelligence physique.
 01
01Capacité de base
Évolution technologique
Des couches tactiles plus denses, sensibles et économes pour surfaces complexes.
- Matrices denses
- Puces basse conso
- Intégration flexible
 02
02Adoption industrielle
Extension des scénarios
Un retour tactile fiable pour robots, habitacles, santé et énergie.
- Robots incarnés
- Habitacles intelligents
- Santé et énergie
 03
03Collaboration ouverte
Écosystème ouvert
Plateformes, données et standards connectent les partenaires à grande échelle.
- Plateforme développeurs
- Standards industriels
- Partenaires mondiaux
Construire l’avenir ensemble
Construire l’avenir de l’intelligence incarnée avec NeuroSkin
Nous invitons les partenaires robotique, automobile, santé, énergie, recherche et industrie.