Recognize shape, position, and boundaries
Give AI real touchHelp robots understandthe physical world
For the embodied intelligence eraPhysical Intelligence Infrastructure
NeuroSkin gives embodied AI tactile data to feel, understand, and interact with the world.
Flexible Tactile Sensing
Ultra-dense tactile arraysFull-surface conformal sensing
Robotic Electronic Skin
A whole-body tactile networkA second skin for robots
Physical AI Infrastructure
Physical interaction data layerDriving embodied intelligence
Touch Intelligence Engine
Understand contact and forceInterpret motion through touch
Tactile World Model
Build physical cognitionModel the real world through contact
Data Flywheel Driven
Real-world closed data loopMore deployed, more intelligent
Why Touch Matters
Touch lets AI trust the world
Vision shows appearance. Language reasons. Touch turns force and texture into physical data.
Real contactTactile signalsTrusted physical model
ContactForceFrictionSlipTextureDeformation
The hardest problem for robots is not seeing. It is everything that happens after contact.

Organize knowledge, instructions, and reasoning
Verify contact, force, and change
Physical Intelligence Infrastructure
Core capability: tactile model platform
NeuroSkin connects tactile arrays, robotic skin, and real scenes into a trainable data system.
Core PlatformTactile Model Platform
It collects contact, force, slip, texture, and deformation data for robot learning.
Tactile deploymentReal interaction dataTactile model trainingRobot capability loop
Turns real contact into trainable, reusable, and continuously growing data assets.
Learns the physical relationships between contact, force, slip, friction, and deformation.
Feeds back into dexterous manipulation, stable grasping, and robot world models.
We are not only building tactile devices.
We are building a tactile model platform and a real-world physical interaction data loop.
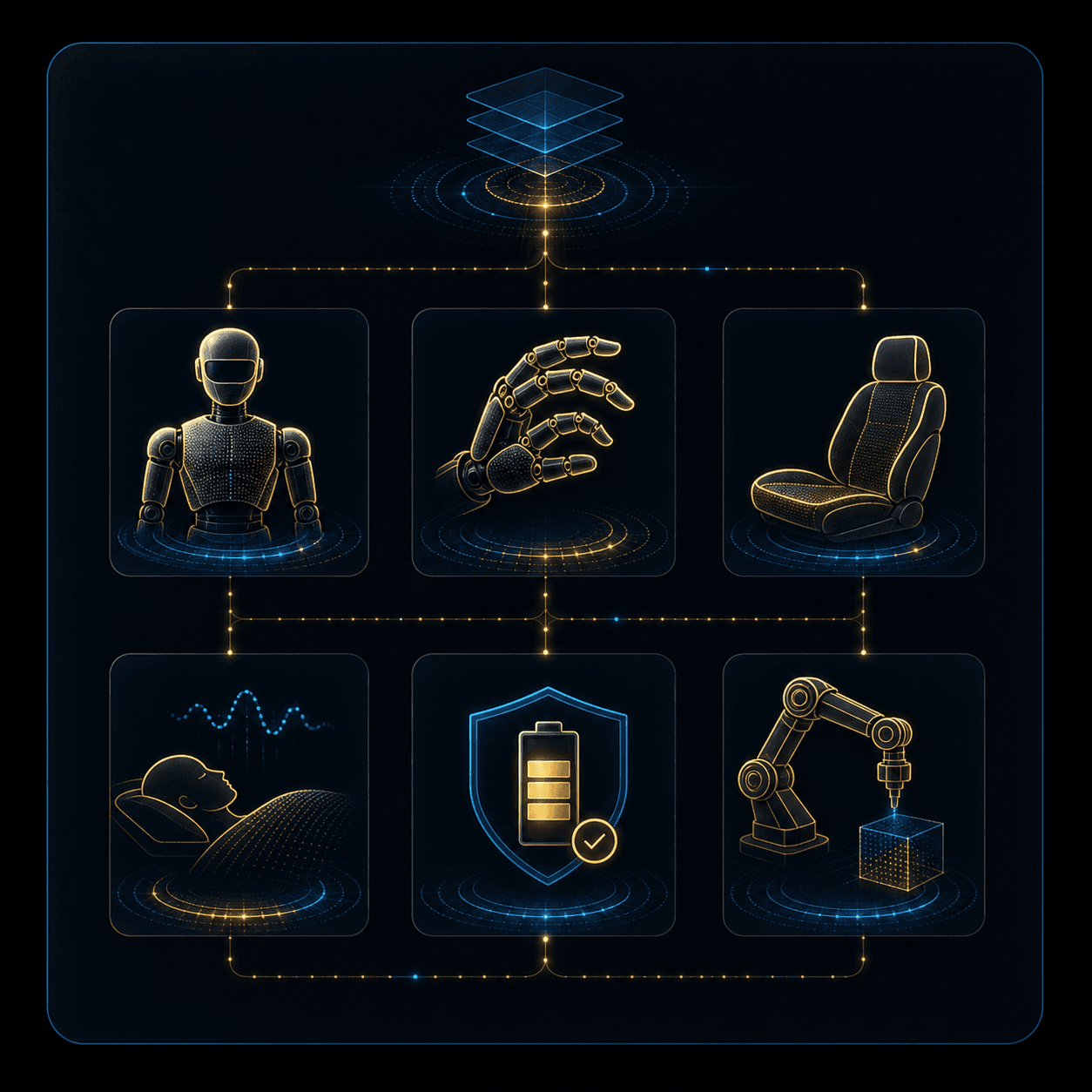
Core Product Matrix
Core Product Matrix
Tactile hardware turns real contact into trainable, reusable physical interaction data.
Flagship Sensing LayerTouch tells AI what the world is.
UltraMatrix
UltraMatrix™
Start from flexible tactile matrices. Build the robot tactile data layer.UltraMatrix™ feeds NeuroSkin models with contact, pressure, slip, and deformation data.
8192+ points sense subtle contact changes
0.18mm ultra-thin structure fits complex surfaces
Turns physical interaction into trainable data
Ultra-thinHighly flexibleHigh densityConformal surfaces

8192+High-density touch pointsArray-scale sensing
0.18mmUltra-thin flexibilityIndustry leading
98%+Pressure accuracyStable sensing
<10msReal-time tactile latencyFast response
-40℃~85℃Wide-temperature operationIndustrial reliability

02
DexSense™
Fingertip touch for dexterous hands
Finger fitStable graspSlip feedback
Dexterous handsAssembly
03
NeuroSkin™
Full-body electronic skin for robots
Body coverageReal-time touchData return
HumanoidsService robots

04
SeatSense™
Seat posture and pressure sensing
PosturePressure mapCabin interaction
Smart seatsDoor seals

05
SleepGuard™
Sleep and vital-sign sensing
Heart and breathSleep analysisBed-exit alert
Smart mattressLong-term care

06
Battery Safety System
Battery pressure safety warning
Pressure sensingEarly warningRunaway prevention
Power batteriesEnergy storage
NeuroSkin Data Flywheel
NeuroSkin Data Flywheel
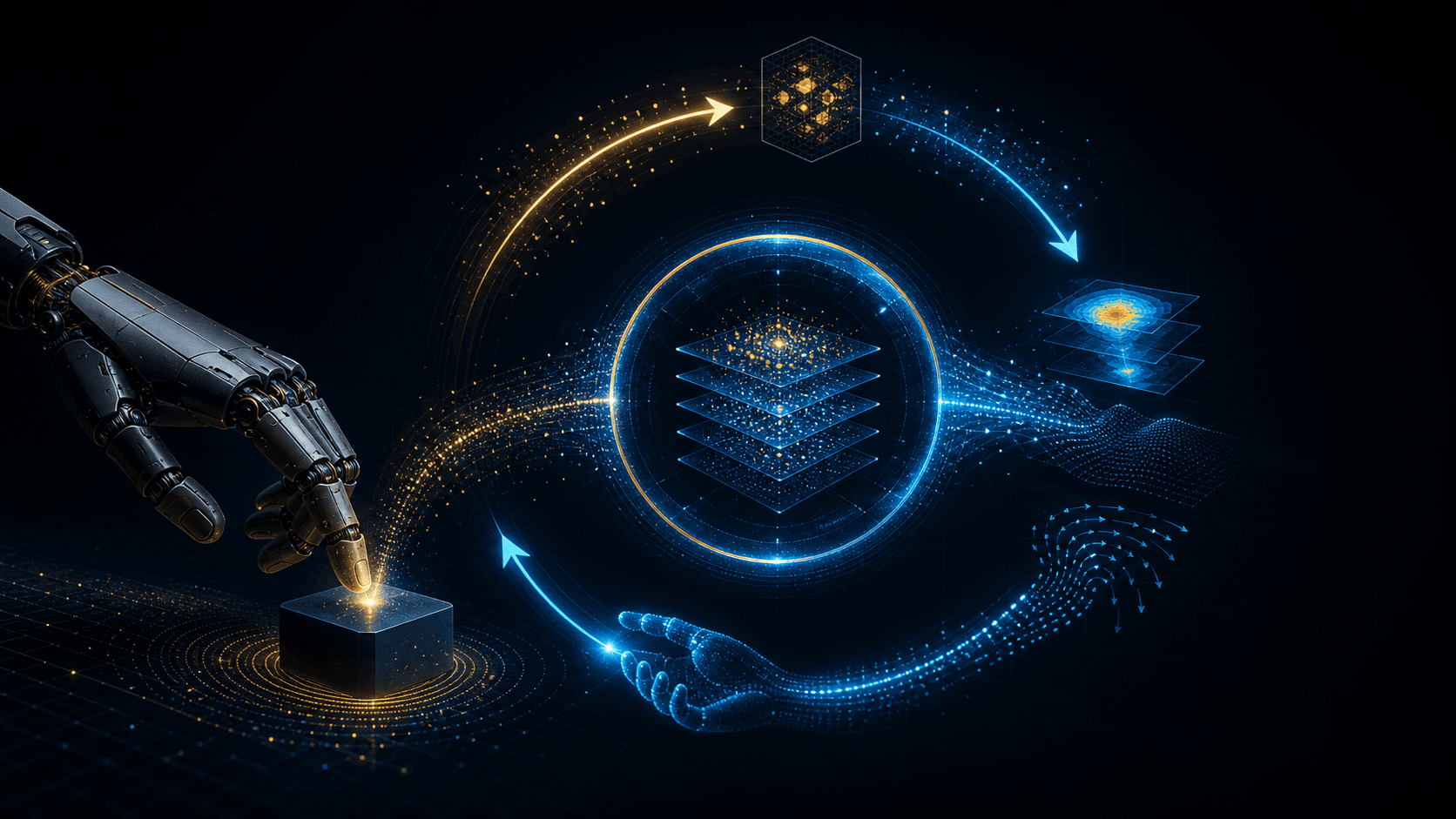
NeuroSkin turns every real-world touch into trainable, reusable, compounding data for robots.
Deploy sensing surfaces
Electronic skin covers hands, arms, bodies, and real scenarios.
Capture real contact
Pressure, slip, friction, deformation, and outcomes become data.
Train and improve
Models learn contact physics and feed better skills back to robots.
Deploy
Put touch on robots.
Sense
Capture contact and slip.
Structure
Make data trainable.
Train
Learn contact physics.
Improve
Improve grasp and control.
More deployment, more tactile data. More data, better physical intelligence.
Full-Stack Tactile Intelligence Architecture
Full-Stack Tactile Technology Architecture
NeuroSkin links arrays, chips, algorithms, cloud, and applications into one tactile stack.
Sensing
Sensing Layer
Turn real contact into dense tactile signals.
- UltraMatrix
- NeuroSkin
- Flexible arrays
Chip
Chip Layer
Capture and transmit signals at low power.
- NeuroSkin SoC
- Edge AI
- Low power
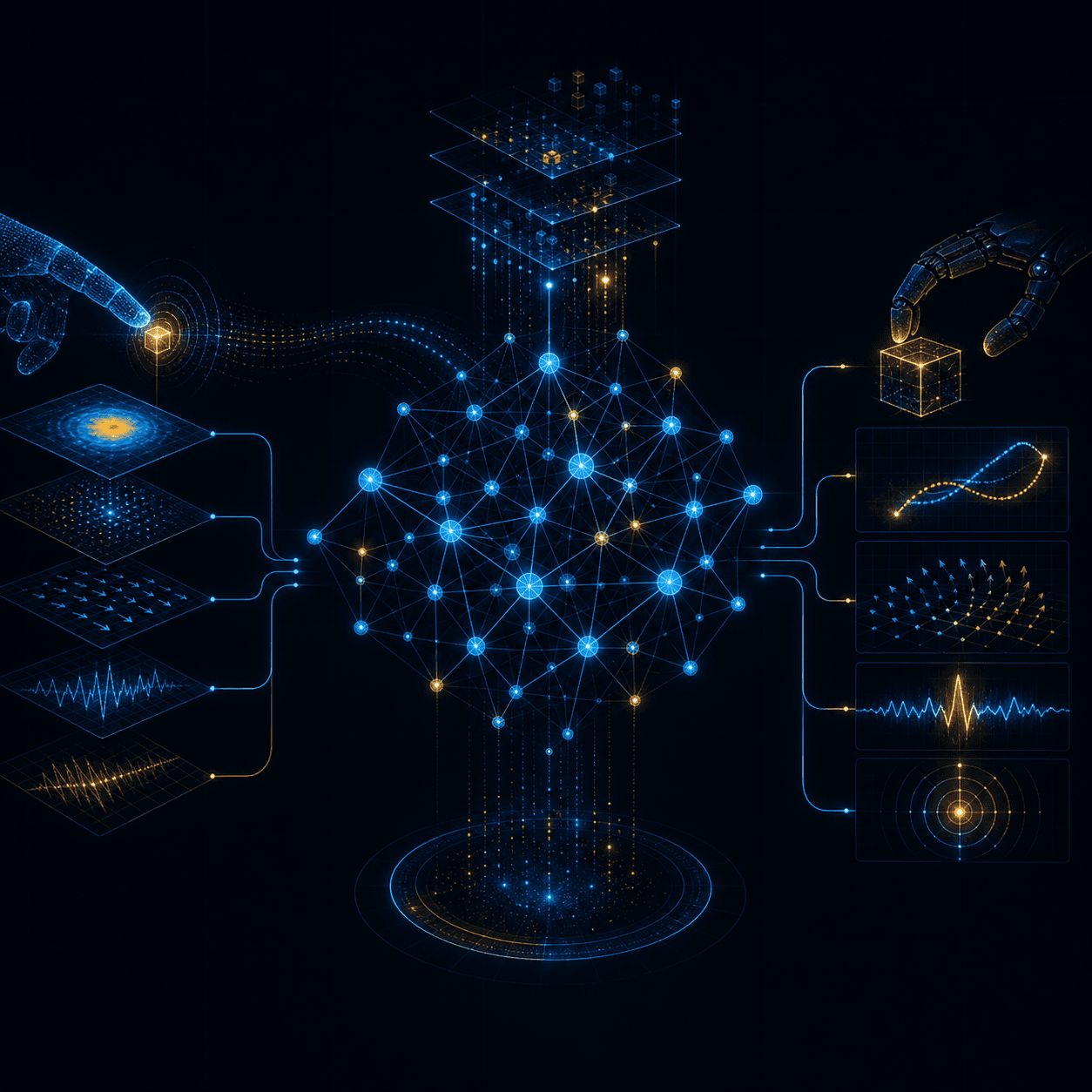
Algorithm
Algorithm Layer
Understand force, slip, friction, and texture.
- Force
- Slip
- Friction

Platform
Platform Layer
Close the loop with data and model training.
- Data Flywheel
- Model Training
- API/SDK
Application
Application Layer
Serve robots, cabins, health, and energy safety.
- Robots
- Smart Cabin
- Battery Safety
Technology Moat
Core Technology Moat
From materials to models and data, NeuroSkin turns touch into a compounding system advantage.
 01
01Tactile resolution
UltraMatrix
Dense tactile nodes turn contact detail into computable signals.
 02
02Material system
Flexible Materials
Soft structures conform to curved surfaces and complex objects.
 03
03Touch cognition
Touch AI
Pressure, slip, friction, and texture become contact understanding.
 04
04Data loop
NeuroSkin Flywheel
Real tactile data flows back to make models stronger over time.
 05
05Foundation model
Tactile Foundation Model
Tactile experience becomes reusable physical intelligence.
Technology is the base. Growing real-world tactile data becomes the durable moat.
Future Vision
The Path Ahead for Touch Intelligence
NeuroSkin brings real touch from core capability into physical intelligence scenarios.
 01
01Core capability
Technology Evolution
Denser, more sensitive, lower-power tactile layers for complex surfaces.
- Dense arrays
- Low-power chips
- Flexible integration
 02
02Industry adoption
Scenario Expansion
Reliable tactile feedback for robots, cabins, health, and energy devices.
- Embodied robots
- Smart cabins
- Health and energy
 03
03Open collaboration
Ecosystem Building
Platforms, data, and standards connect partners for scaled deployment.
- Developer platform
- Industry standards
- Global partners
Build the Future Together
Build the future of embodied intelligence with NeuroSkin
We welcome partners in robotics, automotive, healthcare, energy, research, and industry.